E-machines are ubiquitous when it comes to converting electrical energy into motion and vice versa. Among the many types of e-machines, the asynchronous machine (ASM) is one of the most important and widespread machine types. Precise design is therefore an important task. This can be realized multiphysically with Ansys Motor-CAD.

Generators with turbines for conventional power plants | © Adobe Stock

Multiphysical simulations in Ansys Motor-CAD | © Ansys Inc.
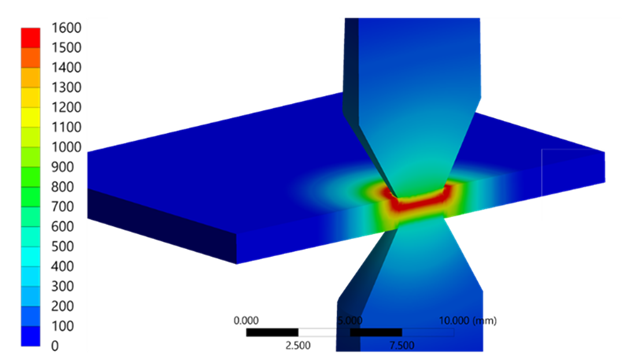
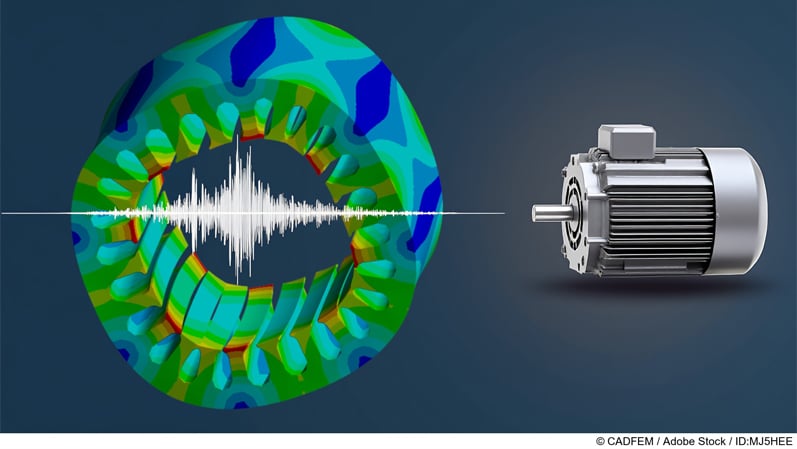
Rotor strength - will the squirrel cage hold or will the short-circuit bars be torn outwards? - or acoustics are further points that must also be taken into account. Ansys Motor-CAD provides the possibility to answer all these questions directly in one tool. The critical points for thermal, rotor strength and acoustics differ between synchronous and asynchronous machines. For example, the hotspot in synchronous machines is usually found in the stator winding, whereas in induction machines it is often the cage rotor. Here, high eddy currents cause the cage to heat up considerably, which is why copper is sometimes used as the cage material.

Equivalent circuit model of an induction machine | © CADFEM Germany GmbH


Torque-speed characteristic of an asynchronous machine | © CADFEM Germany GmbH

Schematic efficiency map of an IM (left) and a PMSM (right) | © CADFEM Germany GmbH

Efficiency map of an IM with unchanged (left) and reduced stator teeth (right) | © CADFEM Germany GmbH