The classical task of structural mechanics is to design stiffer or lighter structures for obvious reasons. Damping, on the other hand, is often perceived as something hardly tangible. It is little known how elegant damping of assemblies can be simulated and thus creatively designed to reduce vibrations. Right, we are talking about damping as a result quantity in the following.
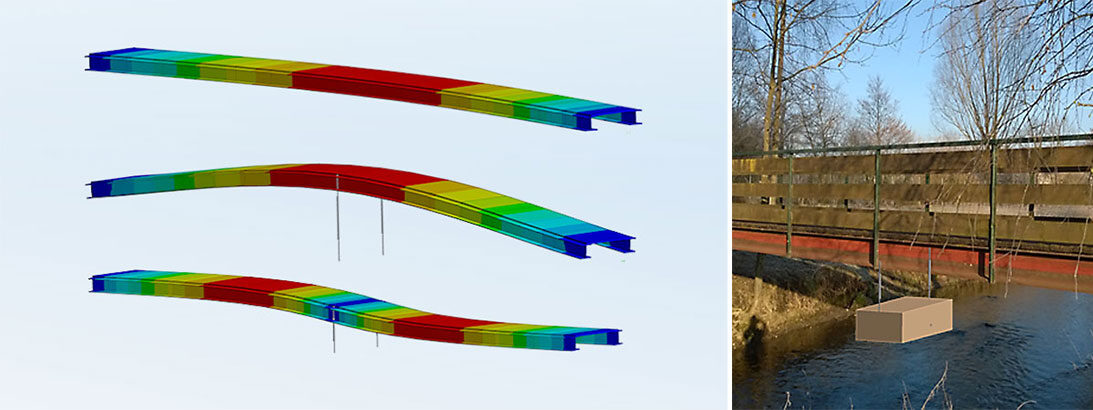

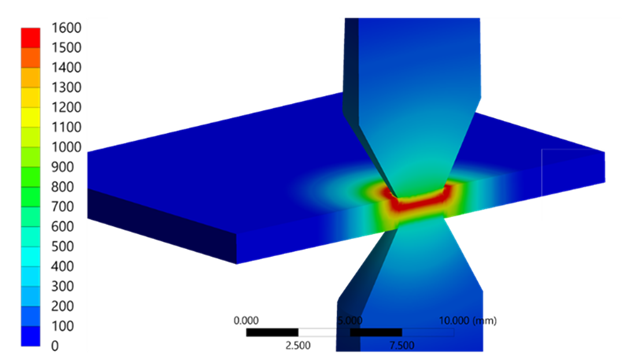
Plate vibration with loss factor 0.1% (left) and 1% (right) | © CADFEM

Damped modal analysis for a bridge with discrete damping measures looking for the optimal damping constant | © CADFEM

Analysis Settings with Damping Controls for MSUP (left) and FULL (right) | © CADFEM
Quick Reference Guide (QRG): Vibration Reduction through Tuned Mass Dampers
The QRG provides you with an excerpt from our training course “Understand and Simulate Damping of Mechanical Vibrations”. Practical knowledge for quick reference in your day-to-day work, formulas, definitions, menu commands and short instructions in a compact format. Are you interested in the entire training course on this topic? You can find all the information here!
Download QRG for free_Training_CADFEM_QRG_EN.jpg?width=596&height=842&name=Vibration_reduction_through_tuned_mass_dampers_(TMD)_Training_CADFEM_QRG_EN.jpg)

Stress-strain hysteresis for a linear viscous and an arbitrary nonlinear material specimen | © CADFEM

Constrained Layer Damping Treatment (CLDT) | © CADFEM

Vibrating pedestrian bridge with a sketched tuned mass absorber (TMD) | © CADFEM