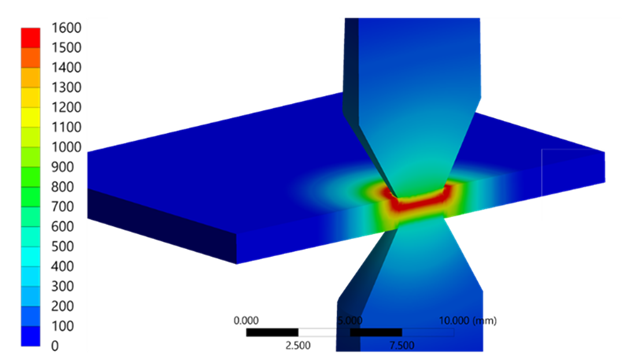
Using a drop-test simulation, we would like to show you that it is not always necessary to defeature your CAD model in a time-consuming manner, because Ansys offers efficient meshing strategies for explicit simulations. Although often frowned upon for historical reasons, tetrahedron elements and in particular quadratic tetrahedron elements can be the solution for thin-walled, complex components. Especially for newcomers to explicit simulation, we recommend the safe route via quadratic elements, global meshing settings and automatic mesh defeaturing.

Different level of complexity | © CADFEM Germany GmbH


Model set up of an impact simulation | © CADFEM Germany GmbH / Model: Grabcad

Meshing workflow of an explicit | © CADFEM Germany GmbH

Proven global settings | © CADFEM Germany GmbH
Quick Reference Guide (QRG): Special meshing requirements for explicit dynamics
The QRG provides you with an excerpt from our training course “Practice-Oriented Meshing in Ansys LS-DYNA”. Practical knowledge for quick reference in your day-to-day work, formulas, definitions, menu commands and short instructions in a compact format. Are you interested in the entire training course on this topic? You can find all the information here!
Download QRG for free


Linear and quadratic tetrahedron in LS-DYNA | © CADFEM Germany GmbH

Comparison of different element types | © CADFEM Germany GmbH / Modell Grabcad

Convergence study on Tet10 und Tet16 | © CADFEM Germany GmbH / Modell Grabcad