E-Maschinen sind allgegenwärtig, sobald es darum geht elektrische Energie in Bewegung und umgekehrt zu wandeln. Unter den vielen Arten von E-Maschine ist die Asynchronmaschine (ASM) eine der wichtigsten und verbreitetsten Maschinenarten. Daher ist die präzise Auslegung eine wichtige Aufgabe. Dies kann mit Ansys Motor-CAD multiphysikalisch realisiert werden kann.

Generatoren mit Turbinen für konventionelle Kraftwerke | © Adobe Stock

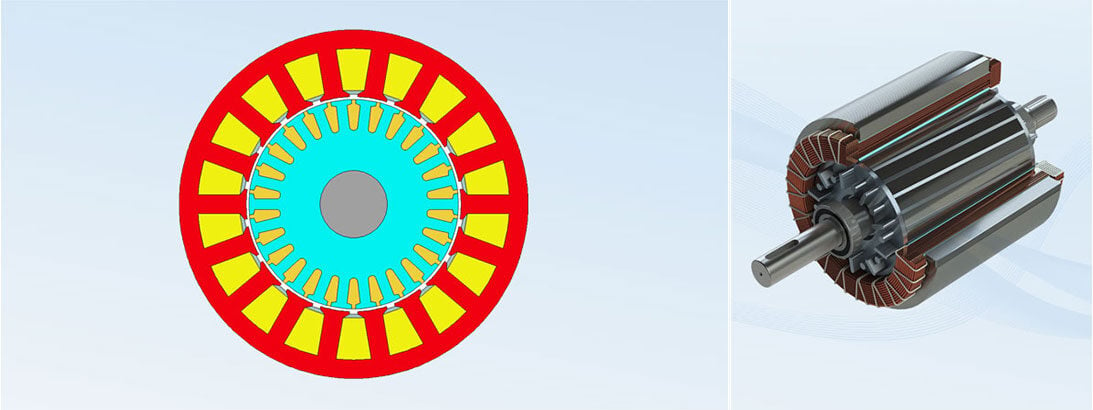
Multiphysikalische Simulationen in Ansys Motor-CAD | © Ansys Inc.
Rotorfestigkeit – hält der Kurzschlusskäfig oder werden die Kurzschlussstäbe nach außen gerissen? – oder Akustik sind weitere Punkte, die ebenfalls berücksichtigt werden müssen. Ansys Motor-CAD liefert hier direkt in einem Tool die Möglichkeit, all diese Fragestellungen zu beantworten. Die kritischen Stellen bei der Thermik, Rotorfestigkeit und Akustik unterscheiden sich zwischen Synchronmaschinen und Asynchronmaschinen. Beispielsweise ist der Hotspot bei Synchronmaschinen üblicherweise in der Statorwicklung zu finden, bei Induktionsmaschinen ist das öfter mal der Käfigläufer. Dort verursachen hohe Wirbelströme eine deutliche Erwärmung des Käfigs, weshalb gelegentlich Kupfer als Käfigmaterial eingesetzt wird.

Ersatzschaltbild einer Induktionsmaschine | © CADFEM Germany GmbH


Drehmoment-Drehzahl-Kennlinie einer Asynchronmaschine | © CADFEM Germany GmbH

Schematisches Wirkungsgradkennfeld einer IM (links) und einer PMSM (rechts) | © CADFEM Germany GmbH

Wirkungsgradkennfeld einer IM mit unveränderten (links) und reduzierten Statorzähnen (rechts) | © CADFEM Germany GmbH